MAKE A MEME
View Large Image
| View Original: | Europa_USGS_map.jpg (5702x6322) | |||
| Download: | Original | Medium | Small | Thumb |
| Courtesy of: | commons.wikimedia.org | More Like This | ||
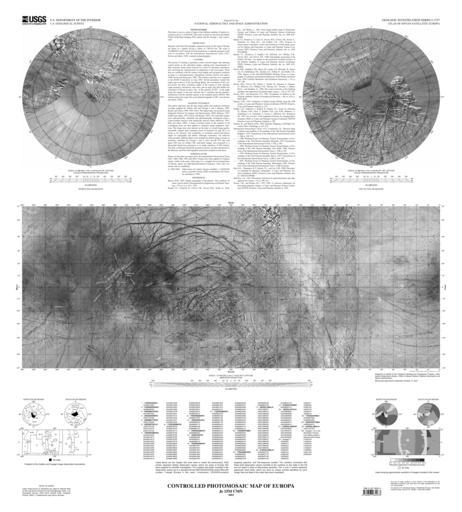
| Keywords: Europa USGS map.jpg en Prepared on behalf of the Planetary Geology and Geophysics Program Solar System Exploration Division Office of Space Science National Aeronautics and Space Administration NOTES ON BASE This sheet is one in a series of maps of the Galilean satellites of Jupiter at a nominal scale of 1 15 000 000 This series is based on data from the Galileo Orbiter Solid-State Imaging SSI camera and the Voyager 1 and 2 space- craft PROJECTION Mercator and Polar Stereographic projections used for this map of Europa are based on a sphere having a radius of 1 562 09 km The scale is 1 8 388 000 at ±56° latitude for both projections Longitude increases to the west in accordance with the International Astronomical Union 1971; Davies and others 1996 Latitude is planetographic CONTROL The process of creating a geometric control network began with selecting control points on the individual images making pixel measurements of their locations using reseau locations to correct for geometric distortions and converting the measurements to millimeters in the focal plane These data are combined with the camera focal lengths and navigation solutions as input to a photogrammetric triangulation solution Davies and others 1998; Davies and Katayama 1981 The solution used here was computed at the RAND Corporation in June 2000 Solved parameters include the radius given above of the best-fitting sphere the coordinates of the con- trol points the three orientation angles of the camera at each exposure right ascension declination and twist and an angle W0 that defines the orientation of Europa in space W0 ”in this solution 36 022° ”is the angle along the equator to the east between the 0° meridian and the equator ™s intersection with the celestial equator at the standard epoch J2000 0 This solution places the crater Cilix at its defined longitude of 182° west Davies and others 1996 MAPPING TECHNIQUE This global map base uses the best image quality and moderate resolution coverage supplied by Galileo SSI and Voyager 1 and 2 Batson 1987; Becker and others 1998; 1999; 2001 The digital map was produced using Integrated Software for Imagers and Spectrometers ISIS Eliason 1997; Gaddis and others 1997; Torson and Becker 1997 The individual images were radiometrically calibrated and photometrically normalized using a Lunar-Lambert function with empirically derived values McEwen 1991; Kirk and others 2000 A linear correction based on the statistics of all overlapping areas was then applied to minimize image brightness varia- tions The image data were selected on the basis of overall image quality reasonable original input resolution from 20 km/pixel for gap fill to as much as 40 m/pixel and availability of moderate emission/incidence angles for topography and albedo Although consistency was achieved where possible different filters were included for global image coverage as necessary clear/blue for Voyager 1 and 2; clear near-IR 757 nm and green 559 nm for Galileo SSI Individual images were projected to a Sinusoidal Equal-Area projection at an image resolution of 500 m/pixel The final constructed Sinusoidal projection mosaic was then reprojected to the Mercator and Polar Stereographic projections included on this sheet NOMENCLATURE Names on this sheet are approved by the International Astronomical Union IAU 1980 1986 1999 and 2001 Names have been applied for features clearly visible at the scale of this map; for a complete list of nomenclature of Europa please see http //planetarynames wr usgs gov Font color was chosen only for readability http //geopubs wr usgs gov/i-map/i2757/ USGS 2001-10-17 PD-USGov Maps of Europa | ||||
{kind=link}
{kind=link}